robots industrialesson equipos importantes en la mejora de la fabricación avanzada, y ellos son también un indicador importante del nivel tecnológico de un país fabricación industria. La industria de los robots con robots industriales como cuerpo principal es una forma importante de resolver los problemas del aumento de los costos industriales y las limitaciones ambientales en my país. un robot industrial es una articulación múltiple manipulador o un multi-grado de libertad dispositivo de máquina orientado al campo industrial. puede realizar trabajo automáticamente y es una máquina que se basa en su propia potencia y capacidades de control para lograr varias funciones. puede ser comandado por humanos, y también se puede ejecutar de acuerdo con preestablecido programas. Los robots industriales modernos también pueden realizar tareas de acuerdo con los principios y pautas establecidos por la tecnología de inteligencia artificial.

El primer robot industrial conforme a la ISO estándar fue producido por bill griffith taylor en 1937 y publicado en la revista meccano en marzo de 1938. Este parecido a una grúa robot industrial fabricado con piezas mecano y accionado por un solo motor eléctrico. Este robot industrial puede apilar bloques de madera en un preprogramado camino.

La mitad del siglo XX fue un período crítico para la investigación y el desarrollo de robots industriales. especialmente en el entorno industrial, el trabajo de movimientos repetitivos y el levantamiento de objetos pesados hicieron de la máquina una gran ayuda para los humanos. la mayoría de los robots industriales se utilizan en entornos de trabajo que son demasiado sucios, agotadores o peligrosos para los seres humanos.
george Devol propuso por primera vez el concepto de robots industriales y solicitó una patente en 1954 (patente aprobada en 1961). en 1956, Davor y josé Engelberg constituidos conjuntamente Unimation basado en Davor's original patente. en 1959, Unimation's primer robot industrial nació en los Estados Unidos, abriendo una nueva era de desarrollo de robots.
▲ george Davor
la robótica es una multidisciplinar campo que combina los campos de la mecánica, la electrónica, la informática, el control, la inteligencia artificial, la física y las matemáticas. Los robots industriales se componen de seis componentes básicos: unidades dinámicas, final de brazo máquinas, controladores informáticos digitales, actuadores, dispositivos de entrada y detectores.

robot industrial actuador: El actuador controla cada eje y mantiene la dirección de movimiento. Desde el robot necesita soportar el peso de varios componentes, su movimiento varía mucho. enviar comandos sobre la dirección del movimiento desde la computadora robot y verifique constantemente la retroalimentación para asegurarse de que las partes móviles sigan la ruta correcta. Este El proceso requiere equipo de alta velocidad para enviar comandos y leer el movimiento del sistema a una velocidad razonable.
ordenador digital controlador: Para el robot, controla el funcionamiento normal de cada componente. El controlador de la computadora puede ingresar y almacenar varios programas para determinar la conexión y relación de la secuencia de trabajo.
Sensores: El robot utiliza sensores para reconocer y evaluar los cambios de posición, las diferencias de estilo y los obstáculos o fallas de los sistemas externos.
retroalimentación sistema: El dispositivo de retroalimentación del robot industrial puede medir la posición, velocidad de movimiento y aceleración de cada eje. El eje debe poner cualquier punto a cero como punto de referencia para lograr un movimiento relativamente lineal.
dinámico sistema: la parte de movimiento del sistema de robot, incluido el brazo de robot industrial. La estructura del sistema dinámico se realiza conectando muchas articulaciones de rotación o movimiento lineal.
El movimiento proporcionado por las articulaciones de los robots industriales puede colocar la estructura del robot o el brazo del robot en una posición específica. Los diferentes tipos de configuraciones de juntas se enumeran a continuación——
▲ robot industrial abb completó el "Fanta Tanque" desafío
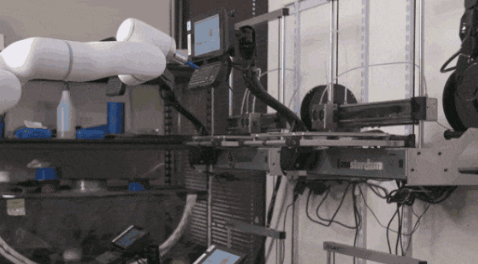
articulado configuración: El brazo articulado es el brazo robótico más común, muy similar a un brazo humano. generalmente seis ejes máquinas, ellos proporcionan redundancia y movimiento más suave.
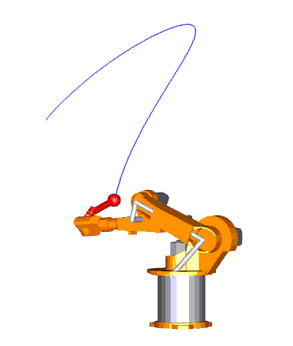
▲ configuración de junta articulada
hay seis juntas giratorias en el sistema de configuración articulada, y cada junta giratoria se coloca en la junta anterior. Ellos tienen una variedad de configuraciones para llegar a un punto dentro del área de trabajo o la capacidad de colocar equipos en cualquier lugar.
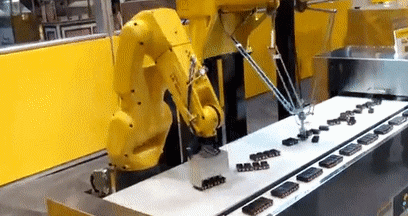
SCARA configuración: Este cuatro ejes brazo realiza principalmente tareas de montaje. Ellos son de tamaño pequeño, pero tienen la mayor capacidad de carga.
▲ SCARA configuración configuración conjunta
El cuatro ejes brazo del SCARA La configuración se compone de rotación básica, movimiento vertical lineal y dos movimientos de rotación. El movimiento vertical lineal está en el mismo plano vertical. El cuatro ejes brazo del SCARA La configuración es muy rígida en la dirección vertical y se puede garantizar que sea coherente con el plano horizontal.
cartesiano configuración: los robots cartesianos son simples robots de tres ejes que solo contienen accionamientos lineales con tres husillos. utilizado habitualmente para picking y colocación, manipulación, paletizado, moldeado de plástico, montaje y mantenimiento de maquinaria.
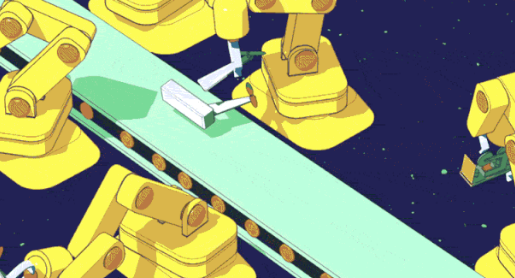
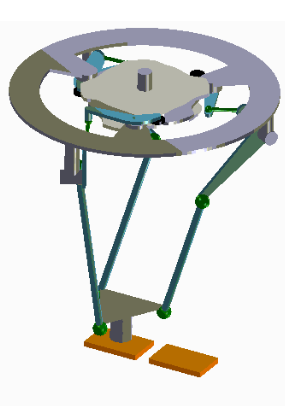
paralelo configuración: Uno de los nuevos desarrollos de diseño es la configuración del robot en paralelo o incremental, como se muestra en la figura a continuación——
▲ robot industrial paralelo
un mecanismo paralelo se puede definir como bucle cerrado mecanismo en el que la plataforma móvil y la plataforma fija están conectadas por al menos dos cinemáticas independientes cadenas, el mecanismo tiene dos o más grados de libertad y se acciona en paralelo
Las aplicaciones típicas de los robots industriales incluyen soldadura, pintura, ensamblaje, recolección y colocación (como embalaje, paletización y SMT), inspección y prueba de productos, etc. todas las tareas se realizan con alta eficiencia, durabilidad, velocidad y precisión.
para realizar las tareas de trabajo con mayor precisión, los robots industriales suelen incluir subsistemas de visión artificial como su sensores de visión, conectados a potentes ordenadores o controladores. Para robots industriales modernos, robots de inteligencia artificialse han vuelto cada vez más importantes equipos.
 español
español English
English français
français Deutsch
Deutsch русский
русский português
português العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt



























 IPv6 red compatible 粤ICP备2021036697号
IPv6 red compatible 粤ICP备2021036697号 Servicio en línea
Servicio en línea 4000988557
4000988557 sales1@troysupply.com
sales1@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com