 español
español English
English français
français Deutsch
Deutsch русский
русский português
português العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt


Llámanos ahora
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.

considerando que la densidad actual de robots industriales en la industria manufacturera global es 55, mientras que la densidad de China robots industriales es sólo 21, que es mucho más bajo que la de países desarrollados como Japón, Corea del Sur, Alemania y Estados Unidos, y en el contexto de la fabricación inteligente, la política de "sustitución de máquinas" sigue siendo implementado. todavía hay mucho espacio para el crecimiento. empresas de concepto relacionado como Inovance Tecnología, Robótica, Zhiyun Co., Ltd., Keyuan Co., Ltd. y Qinchuan La máquina herramienta logrará un mejor desarrollo bajo el dividendo robot.
La etapa de desarrollo de los robots industriales.
El desarrollo de robots industriales generalmente se puede dividir en tres generaciones:
1. primera generación de robots industriales:
generalmente se refiere a la “programable industrial robots ” que actualmente se comercializan y utilizan a nivel internacional, también conocido como “enseñanza y reproducción de robots industriales ”, es decir, para que el robot industrial complete una determinada tarea, el operador primero completará la tarea. todo tipo de conocimiento (como trayectoria de movimiento, condiciones de operación, secuencia de operación y tiempo de operación, etc.) de robots industriales se puede "enseñar" a través de medios directos o indirectos. después de que los robots industriales memoricen este conocimiento, ellos puede "reproducir" Las instrucciones, dentro de un cierto rango de precisión, reproducen fielmente varias acciones enseñadas repetidamente. en 1962, el primer Unimate robot industrial de automatización universal de los estados unidos se puso en uso en motores generales de Estados Unidos, marcando el nacimiento de la primera generación de robots industriales.
2, segunda generación de robots industriales:
normalmente se refiere a un "robot inteligente" con algún tipo de inteligencia (como tacto, fuerza, visión, etc.). Eso es decir, después de que los sensores reciben información como el tacto, la fuerza y la visión, la computadora controla el robot operación de la máquina para completar las correspondientes operaciones apropiadas. En 1982, General Motors en Estados Unidos equipó al robot industrial con un sistema de visión en la línea de montaje, anunciando así la llegada de una nueva generación de robots industriales inteligentes.
3, tercera generación de robots industriales:
es el llamado "robot industrial único ". no solo tiene una función de percepción, sino que también tiene cierta toma de decisiones y capacidades de planificación. La primera generación de robots industriales se encuentra todavía en la etapa de investigación de laboratorio. después del nacimiento-crecimiento-madurez período, los robots industriales se han convertido en un equipo básico indispensable en la industria manufacturera. hay alrededor de 750.000 robots industriales en el mundo luchando codo a codo con trabajadores y amigos en todas las líneas de producción.
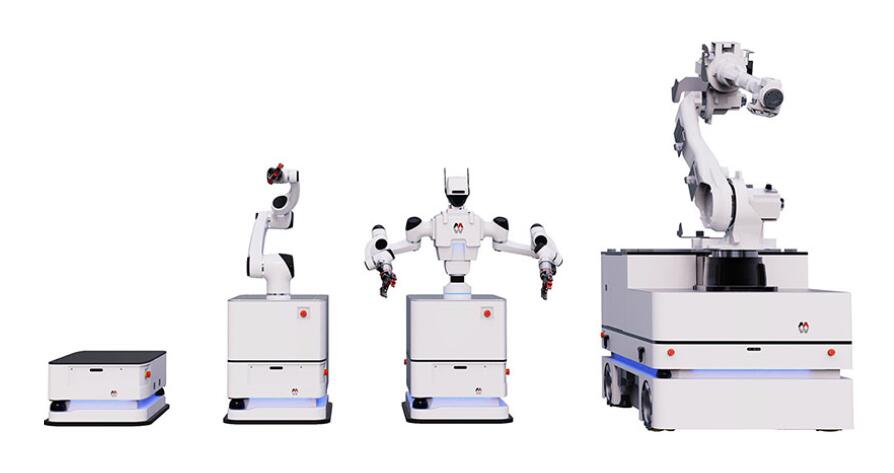
como estrella en ascenso de la familia de los robots, los robots especiales tienden a provenir atrasado debido a su amplia gama de usos. Robots especiales para diversos fines, como robots humanoides, robots agrícolas, robots de servicio, robots submarinos, robots médicos, robots militares y robots de entretenimiento han surgido Y se está moviendo hacia practicidad a un ritmo rápido.
clasificación de robots industriales
Los robots industriales se pueden dividir en los siguientes tipos de acuerdo con diferentes métodos
1. Los robots industriales se dividen en las siguientes categorías según la forma de coordenadas del manipulador: (La forma de coordenadas se refiere a la forma del sistema de coordenadas de referencia que toma el brazo del manipulador cuando se mueve.)
(1) robot industrial de coordenadas cartesianas
su parte de movimiento se compone de tres movimientos lineales mutuamente perpendiculares (a saber PPP), y su espacio de trabajo es rectangular. su distancia de movimiento en cada eje se puede leer directamente en cada eje de coordenadas. es intuitivo, fácil de programar y calcular la posición y la postura, tiene alta precisión de posicionamiento, sin control de acoplamiento, estructura simple, pero el cuerpo ocupa un gran espacio. El rango de movimiento es pequeño, la flexibilidad es pobre y es difícil de coordinar con otros robots industriales.
(2) robot industrial de coordenadas cilíndricas
su forma de movimiento se realiza mediante un sistema de movimiento compuesto por una rotación y dos movimientos. su espacio de trabajo es cilíndrico. en comparación con el robot industrial de coordenadas rectangulares, en las mismas condiciones de espacio de trabajo, el cuerpo ocupa un pequeño volumen. El rango de movimiento es grande y su precisión de posición es superada solo por los robots de coordenadas cartesianas, y es difícil de coordinar con otros robots industriales.
(3) robot industrial de coordenadas esféricas
También conocido como robot industrial de coordenadas polares, el movimiento de su brazo consta de dos rotaciones y un movimiento lineal (es decir, RRP, una rotación, un cabeceo y un movimiento telescópico). su espacio de trabajo es una esfera, que puede realizar movimientos de cabeceo hacia arriba y hacia abajo. Y puede agarrar la pieza de trabajo coordinada en el suelo o enseñar la posición baja, su precisión de posición es alta y el error de posición es proporcional a la longitud del brazo.
(4) Multi-junta robot industrial
también conocido como robot industrial de coordenadas rotativas. El brazo de este robot industrial es similar al miembro superior de un cuerpo humano. sus tres primeras articulaciones son la articulación giratoria (RRR). El robot industrial se compone generalmente de una columna y un brazo grande y pequeño. La columna y el brazo grande se forman, se forma una articulación del codo entre la articulación del hombro, la parte superior del brazo y el antebrazo, que puede hacer que la parte superior del brazo gire y se balancee y se balancee, y la parte inferior del brazo puede hacer un balanceo su estructura es la más compacta, flexible y tiene la huella más pequeña. Puede trabajar en coordinación con otros robots industriales, pero tiene baja precisión de posición, problemas de equilibrio y control acoplamiento. Este tipo de robot industrial se utiliza cada vez más.
(5) Planar robot industrial tipo articulación
utiliza una articulación móvil y dos articulaciones rotativas (PRR), la articulación móvil realiza movimientos hacia arriba y hacia abajo, y las dos articulaciones rotativas controlan los movimientos frontal y posterior, izquierda y derecha. Este La forma de robot industrial también se conoce como (SCARA (Seletive robot de ensamblaje de cumplimiento Brazo) ensamblaje robot. Es flexible en la dirección horizontal y tiene una gran rigidez en la dirección vertical. Tiene una de estructura simple y movimientos flexibles, y se utiliza principalmente para operaciones de montaje. Es especialmente adecuado para el montaje enchufable de piezas de pequeño tamaño, tales como enchufar y ensamblar en la industria electrónica.
2. Los robots industriales se dividen en las siguientes categorías según el modo de conducción:
(1) robot industrial neumático
Este tipo de robot industrial utiliza aire comprimido para accionar el manipulador. sus ventajas son una fuente de aire conveniente, acción rápida, estructura simple, bajo costo y ausencia de contaminación. La desventaja es que el aire es compresible, lo que da como resultado una velocidad de trabajo baja (estabilidad). La presión de la fuente es generalmente de solo 6 kPa, por lo que la fuerza de arranque de este tipo de robot industrial es pequeña, generalmente solo decenas de Newtons, y el máximo es más que 100 Newtons.
(2) robot industrial hidráulico
La presión hidráulica es mucho mayor que la presión del aire, generalmente alrededor de 70 kPa, por lo que el robot industrial de transmisión hidráulica tiene una gran capacidad de arranque, que puede alcanzar miles de newtons. Este tipo de robot industrial tiene estructura compacta, transmisión suave y acción sensible, pero tiene altos requisitos de sellado y no es adecuado para trabajar en entornos de alta o baja temperatura.
(3) robot industrial electrico
Este es el tipo de robot industrial más utilizado, no solo porque de la gran variedad de motores eléctricos, ofrece una variedad de opciones para el diseño de robots industriales, pero también porque ellos puede utilizar una variedad de métodos de control flexibles. en los primeros días, se usaban motores paso a paso para conducir, y luego se desarrollaron las unidades de servoaccionamiento de CC. en la actualidad, las unidades de servodrive de CA también se están desarrollando rápidamente. Estos las unidades de accionamiento accionan directamente el manipulador o se accionan después de la desaceleración a través de un dispositivo como un reductor de armónicos. La estructura es muy compacta y sencilla.
sistema de control de robot industrial
La estructura del sistema de robot consta de robot's parte de mecanismo, grupo de sensores, parte de control y parte de procesamiento de información. El sistema de control es una parte fundamental de la industria de los robots.
1. funciones que debe realizar el sistema de control de robot industrial
El sistema de control del robot se utiliza para controlar el manipulador para completar tareas específicas. sus funciones básicas son las siguientes:
(1) memoria función:
almacenar secuencia de trabajo, ruta de movimiento, modo de movimiento, velocidad de movimiento e información relacionada con el proceso de producción.
(2) enseñanza función:
Fuera de línea programación, enseñanza online, enseñanza indirecta La enseñanza online incluye la docencia box y la enseñanza guiada.
(3) función de contacto con periféricos equipos:
interfaz de entrada y salida, interfaz de comunicación, interfaz de red, interfaz de sincronización.
(4) ajuste de coordenadas función:
hay cuatro sistemas de coordenadas: conjunta, absoluta, herramienta y definida por el usuario.
(5) Hombre-máquina interfaz:
caja de enseñanza, panel de operación, visualización pantalla.
(6) sensor interfaz:
detección de posición, visión, tacto, fuerza, etc.
(7) servo de posición función:
robot multieje vinculación, control de movimiento, control de velocidad y aceleración, compensación dinámica, etc.
(8) protección de seguridad de diagnóstico de averías función:
monitoreo del estado del sistema durante funcionamiento, protección de seguridad en condiciones de avería y autodiagnóstico de averías.
2. Composición del sistema de control de robots industriales.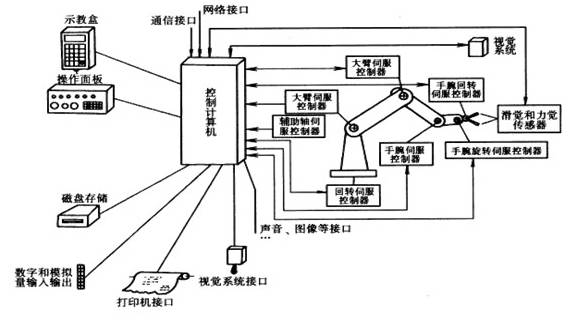
El diagrama de bloques del sistema de control del robot.
(1) control computadora:
La organización de despacho y mando del sistema de control. Generalmente, las microcomputadoras y microprocesadores son de 32 bits, 64 bits, etc., como Pentium CPU de la serie y otros tipos de CPU.
(2) enseñanza caja:
enseñar a los robots trayectoria de trabajo y configuración de parámetros, así como humano-computadora interacción, tener su propia CPU y unidad de almacenamiento independientes, y realizar la interacción de la información con la computadora host a través de la comunicación en serie.
(3) operación panel:
se compone de varios botones de operación e indicadores de estado, y solo completa operaciones funcionales básicas.
(4) disco duro y disquete almacenamiento:
memoria periférica para almacenar programas de trabajo del robot.
(5) entradas y salidas digitales y analógicas:
entrada o salida de varios comandos de estado y control.
(6) impresora interfaz:
registrar diversa información que necesita ser emitida.
(7) sensor interfaz:
se utiliza para la detección automática de información para realizar el control conforme del robot, generalmente sensores de fuerza, tacto y visión.
(8) eje controlador:
completar el control de posición, velocidad y aceleración de la articulación del robot.
(9) equipos auxiliares control:
se utiliza para controlar equipos auxiliares que cooperan con el robot, como pinza posicionador, etc.
(10) comunicación interfaz:
realizar el intercambio de información entre robots y otros dispositivos, generalmente interfaces seriales, interfaces paralelas, etc.
(11) interfaz de red
1) ethernet interfaz: La comunicación directa con la PC de varios robots o uno solo se puede realizar a través de Ethernet, la velocidad de transmisión de datos es de hasta 10 Mbit / sy el programa de aplicación se puede programar directamente en la PC con funciones de biblioteca de Windows, y el tcp / ip compatible con el protocolo de comunicación, cargar datos y programas en cada controlador de robot a través de la interfaz ethernet.
2) Fieldbus interfaz: admite una variedad de fieldbus especificaciones, como red de dispositivos, I / O remoto ab, Interbus-s, profibus-DP, M-NET, etc.
3. clasificación de los sistemas de control de robots industriales
(1) control de programa sistema:
aplica una determinada función de control regular a cada grado de libertad, y el robot puede realizar la trayectoria espacial requerida.
(2) control adaptativo sistema:
Cuando las condiciones externas cambian, para garantizar la calidad requerida o para mejorar la calidad del control con la acumulación de experiencia, el proceso se basa en la observación del estado de la máquina en funcionamiento y el error del servo, y luego ajustar los parámetros del modelo no lineal hasta el error Hasta desaparece. La estructura y los parámetros de este sistema pueden cambiar automáticamente con el tiempo y las condiciones.
(3) inteligencia artificial Sistema:
es imposible compilar programas de movimiento por adelantado, pero requiere la determinación en tiempo real del efecto de control basado en la información de estado circundante obtenida durante el movimiento.
unidad modo: ver sistema de accionamiento de robot industrial.
ejercicio método:
(4) punto tipo:
requiere que el robot controle con precisión la pose del efector final, independientemente de la trayectoria;
(5) pista tipo:
requiere que el robot se mueva de acuerdo con la trayectoria y velocidad enseñada
(6) control bus:
sistema de control de bus estándar internacional. Utilice bus estándar internacional como bus de control del sistema de control, como VME, MULTI-bus, STD-bus, PC-bus.
(7) control de bus personalizado sistema:
El bus definido y utilizado por el propio fabricante se utiliza como sistema de control bus.
(8) programación método:
programación del entorno físico sistema. El operador establece un final de carrera fijo para realizar la operación programada de arranque y parada, que solo puede utilizarse para operaciones simples de recogida y colocación.
(9) en línea programación:
El método de programación del proceso de memoria de la información operativa se completa a través de la enseñanza humana, incluida la enseñanza directa (es decir, mano a mano enseñanza) simulación didáctica y didáctica caja didáctica.
(10) Fuera de línea programación:
no enseñe directamente al robot real, sino por separado de el entorno de trabajo real, generar un programa de enseñanza y generar la trayectoria del robot de forma remota offline utilizando robots de alto nivel y lenguajes de programación.
4. estructura del sistema de control del robot
Los sistemas de control de robots se pueden dividir en tres categorías según su control métodos.
(1) sistema de control centralizado (Centralizado control Sistema): 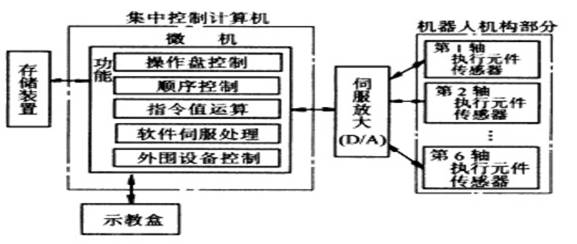
diagrama de bloques del sistema de control centralizado
se utiliza una computadora para realizar todas las funciones de control. La estructura es simple y el costo es bajo, pero el desempeño en tiempo real es pobre y es difícil de expandir. Este La estructura se utiliza a menudo en los primeros robots. El diagrama de bloques se muestra en la figura.
El basado en PC El sistema de control centralizado aprovecha al máximo la apertura de los recursos de la PC y puede lograr una buena apertura: se pueden integrar una variedad de tarjetas de control, dispositivos sensores, etc. en el control mediante estándar PCI ranuras o mediante puertos serie estándar y puertos paralelos. Sistema.
Las ventajas de los sistemas de control centralizado son: bajos costos de hardware, fácil recopilación y análisis de información, fácil de lograr un control óptimo del sistema, mejor integridad y coordinación, y más conveniente basado en PC hardware del sistema expansión. sus defectos también son obvios: el control del sistema carece de flexibilidad y el peligro del control es fácil de concentrar. una vez que ocurre una falla, su impacto es amplio y las consecuencias son graves; porque los requisitos en tiempo real de los robots industriales son muy altos, cuando el sistema realiza una gran cantidad de cálculos de datos, reducirá el rendimiento en tiempo real, el sistema capacidad de respuesta a multitarea también entrará en conflicto con el sistema rendimiento en tiempo real; además, el sistema cableado complejo reducirá el sistema fiabilidad.
(2) Maestro-esclavo control sistema:
utilizando maestro y esclavo dos niveles procesadores para realizar todas las funciones de control del sistema. La CPU principal realiza la gestión, transformación de coordenadas, generación de trayectorias y autodiagnóstico del sistema, etc.; la CPU esclava se da cuenta del control de movimiento de todas las articulaciones. su diagrama de bloques de composición, como se muestra en la figura.
El amo-esclavo El sistema de control tiene un buen rendimiento en tiempo real y es adecuado para alta precisión y control de alta velocidad, pero la escalabilidad del sistema es deficiente y el mantenimiento es difícil 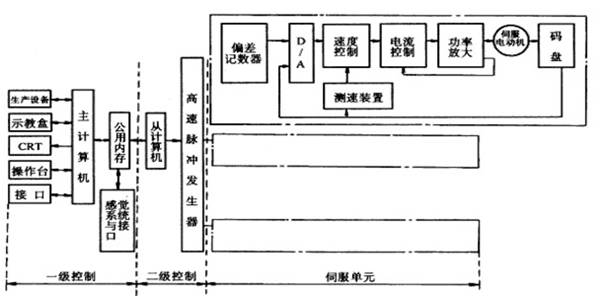
diagrama de bloques del sistema de control maestro y esclavo
(3) distribuir control Sistema:
según la naturaleza y el método del sistema, el control del sistema se divide en varios módulos. cada módulo tiene diferentes tareas de control y estrategias de control. cada modo puede ser un maestro-esclavo relación o una relación de igual
Este El método tiene un buen rendimiento en tiempo real, es fácil de realizar de alta velocidad alta precisión control, es fácil de expandir y puede realizar un control inteligente. es un método popular en la actualidad.
La idea principal es "control descentralizado, gestión centralizada", es decir, el sistema puede coordinar y asignar de manera integral sus objetivos y tareas generales, y completar las tareas de control a través de la coordinación de subsistemas. Todo el sistema es funcional, lógico y físico. está descentralizado, por lo que el sistema dcs también se denomina sistema de control distribuido o sistema de control distribuido.
en esta estructura, el subsistema está compuesto por un controlador y diferentes objetos o dispositivos controlados, y cada subsistema se comunica entre sí a través de una red. La estructura de control distribuida proporciona un sistema de control de robot preciso, abierto y en tiempo real. Dos niveles Los métodos de control se utilizan a menudo en sistemas distribuidos.
Dos niveles sistema de control distribuido, generalmente compuesto por computadora superior, computadora inferior y red. El ordenador superior puede realizar diferentes algoritmos de planificación y control de trayectorias, y el ordenador inferior puede realizar la búsqueda y realización de interpolación y subdivisión y control optimización. La computadora superior y la computadora inferior funcionan en coordinación entre sí a través del bus de comunicación. El bus de comunicación aquí puede tener la forma de RS-232, RS-485, EEE-488 y USB autobús.
Ahora, el desarrollo de ethernet y fieldbus La tecnología proporciona a los robots servicios de comunicación más rápidos, estables y eficaces. especialmente el bus de campo, que se aplica al sitio de producción para realizar dos vías multi-nodo comunicación digital entre microcomputerizado equipos de medida y control, formando así un nuevo tipo de red integrada de control totalmente distribuido sistema-campo sistema de control de bus fcs (Archivado control de bus Sistema) ).
en la red de producción de la fábrica, los dispositivos que se pueden conectar a través de bus de campo se denominan colectivamente "campo dispositivos / instrumentos". Desde La perspectiva de la teoría de sistemas, los robots industriales, como uno de los equipos de producción de la fábrica, también se puede resumir como equipo de campo. después de la introducción de fieldbus tecnología en el sistema de robot, es más propicio para la integración de robots en el entorno de producción industrial.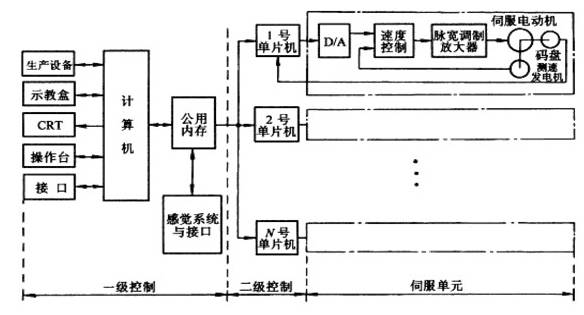
diagrama de bloques del sistema de control distribuido
Las ventajas del sistema de control distribuido son: la flexibilidad del sistema es buena, el riesgo del sistema de control se reduce, el uso de multiprocesador El control distribuido favorece la ejecución en paralelo de las funciones del sistema, se mejora la eficiencia de procesamiento del sistema y se acorta el tiempo de respuesta.
Para Robots industriales con múltiples grados de libertad, control centralizado maneja muy bien la relación de acoplamiento entre cada eje de control y se puede compensar fácilmente. Sin embargo, cuando el número de ejes aumenta para complicar mucho el algoritmo de control, su rendimiento de control se deteriorará. Además, cuando el número de ejes en el sistema o el algoritmo de control se vuelve muy complicado, puede llevar al rediseño del sistema. por el contrario, cada eje de movimiento de la estructura distribuida es procesado por un controlador, lo que significa que el sistema tiene menos acoplamiento entre ejes y una mayor reconfiguración del sistema.
"Industria 4.0" se refiere a la cuarta revolución industrial después de la máquina de vapor, la electrificación y la automatización. combina la industria tradicional con la tecnología de la información digital y realiza una producción inteligente con la ayuda de tecnologías como big data y cloud computing. en China, "Industria 4.0" significa la mejora del país fabricación industria. Para Por esta razón, China ha propuesto específicamente el objetivo de desarrollo de "Hecho en China 2025". El objetivo es pasar de un país fabricante importante a un país fabricante fuerte para 2025.

TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.




















por favor siga leyendo, manténgase informado, suscríbase y le invitamos a que nos cuente qué piensas.
 IPv6 red compatible 粤ICP备2021036697号
IPv6 red compatible 粤ICP备2021036697号 Servicio en línea
Servicio en línea 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com