 español
español English
English français
français Deutsch
Deutsch русский
русский português
português العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt


Llámanos ahora
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.


caracteristicas
Artículo No.:
AR4215Pago:
FOBOrigen del producto:
ChinaColor:
whitePuerto de embarque:
ShenZhen portsTiempo de espera:
20 days
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.
High velocidad y precisión SCARA robot
Especificaciones:
Programación: AR, lenguaje de programación de código g
batir más rápido velocidad: 0,38 s
Precisión: menos que 0,02 mm
Aplicación: velocidad en línea para seguir
Características:
Aplicación:
adecuado para PCBA enchufe, manipulación, clasificación visual, montaje, atornillado, carga, transporte, máquina enchufable, soldadura y otros alta precisión industrias --- industria electrónica y alimentaria .
rendimiento Benchmark - Parámetro:
nombre del modelo | ADT | TOSHIBA | EPSON | YAMAHA | ||
AR4215 | THL400 | LS3-401 | YK400XG-150 | |||
Características del producto | Alta velocidad, alta precisión, muy rentable | bajo costo, peso ligero, energía | Alta velocidad, alta precisión, muy rentable | máquina rentable | ||
especificación del eje | eje x | largo del brazo | 200 mm | 225 mm | 225 mm | 250 mm |
rango de rotación | ± 127 ° | ± 125 ° | ± 132 ° | ± 140 ° | ||
eje y | largo del brazo | 200 mm | 200 mm | 175 mm | 150 mm | |
rango de rotación | ± 142 ° | ± 145 ° | ± 141 ° | ± 144 ° | ||
eje Z | ruta | 150 mm | 160 mm | 150 mm | 150 mm | |
eje r | rango de rotación | ± 360 ° | ± 360 ° | ± 360 ° | ± 360 ° | |
velocidad más alta | eje x | 600 ° / S | 660 ° / S |
|
| |
eje y | 375 ° / S | 660 ° / S |
|
| ||
Síntesis del eje X, y | 5,5 millones / s | 6,3 millones / s | 6m / s | 6,1 millones / s | ||
eje Z | 1,3 millones / s | 1,2 millones / s | 1,1 millones / s | 1,1 millones / s | ||
eje r | 1667 ° / s | 1500 ° / s | 2600 ° / s | 1020 ° / s | ||
repetir la precisión de posicionamiento | Eje X, y | ± 0,01 mm | ± 0,01 mm | ± 0,01 mm | ± 0,01 mm | |
eje Z | ± 0,01 mm | ± 0,015 mm | ± 0,01 mm | ± 0,01 mm | ||
eje r | ± 0,005 ° | ± 0,007 ° | ± 0,01 ° | ± 0,004 ° | ||
tiempo de ciclo estándar | 0,45 s | 0,47 | 0,42 s | 0,49 | ||
calificado / carga maxima | 2Kg / 5kg | 2Kg / 5kg | 1Kg / 3kg | 5 kg | ||
El eje r permite el momento de inercia de la carga (Nominal / max) | 0,01 kg · m2 | 0,05 kg · m2 | 0,05 kg · m2 | 0,05 kg · m2 | ||
0,04 kg · m2 | 0,005 kg · m2 | |||||
línea de señal de usuario | 0.2sq × 16 líneas | 8 entradas / 8 salidas | 0,15 pies cuadrados × 15 líneas | 0,2 pies cuadrados × 10 líneas | ||
6 entrada / 8 salidas | ||||||
usuarios tráquea | Ф6 × 2 | φ4 × 3 | φ4 × 1 | φ4 × 3 | ||
Ф6 × 2 | ||||||
limitar la protección | 1, el límite de software | 1, el límite de software | 1, el límite de software | 1, el límite de software | ||
2, el límite mecánico (eje X, Y, z ) | 2, el límite mecánico (eje X, Y, z ) | 2, el límite mecánico (eje X, Y, z ) | 2, el límite mecánico (eje X, Y, z ) | |||
peso | 13Kg | 13Kg | 14Kg | 19Kg | ||
en movimiento espacio:
selección Destacados:
1. ámbito de trabajo: una longitud del brazo del robot, rango de operación
2. Carga: pinza diseño, la inercia lo más baja posible
3. Precisión: repetir la precisión de posicionamiento
4. El ritmo de trabajar: tiempo de ciclo de acción, tiempo de consumo de gas acción
5.I / o puntos: puntos de entrada y salida universales
6. visual paquete: rastreo estático, rastreo dinámico
7. Comunicación: i / O, red, serial

ADTECH 4 ejes SCARA brazo robot de alto rendimiento y excelente precisión.

fabricante de robots industriales en china con precio económico ADTECH FR5215 sistema 5500mm brazo de elevación de 4 ejes scara robot con sistema avs vision ADTECH es profesional en 4 ejes Scara I + D, producción y servicio de robots. Para reducir el costo de las personas cada vez se utilizan más robots en la línea de producción. ADTECH scara El robot puede reemplazar a NACHI, TOSHIBA, etc.marca de Japón, es la aplicación para PCBA montaje, atornillado carga, embalaje, etc campo electrico.
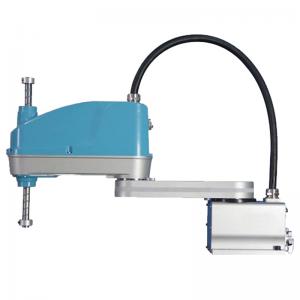
OEM Scara Los robots están diseñados para la fábrica con ensamblaje de componentes eléctricos como Samsung, Foxconn, LG y canon, etc.

TR600B cuatro ejes SCARA robot industrial El robot es un multi-articulaciones cuatro ejes robot con derechos de propiedad independientes completos.adopta un controlador de alto rendimiento para controlar el robot y lograr un movimiento puntual de alta velocidad, movimiento de interpolación lineal espacial, interpolación de arco espacial y otras funciones.es adecuado para el transporte, diversas ocasiones industriales como carga y descarga, soldadura por puntos, encolado, etc.

procesamiento de metales industria: corte en punzonadoras, CNC carga y descarga, rectificado de piezas, desbarbado;productos electronicos industria: montaje, prueba y manipulación de chips de circuito integrado, soldadura por puntos, PCBA soldadura, aplicación de pegamento, atornillado, enchufable, pieza de trabajo pulido;repuestos para automóviles y motocicletas industria: manipulación, encolado, soldadura por puntos; LCD / LED y vidrio industria: manipulación de placas de vidrio, montaje de módulos lcm, manipulación de obleas de silicio y pantallas de visualización; láser industria: soldadura por puntos, corte;electrodomésticos industria: montaje, manipulación y atornillado de electrodomésticos productos;investigación áreas: docencia estudiantil, investigación y desarrollo escolar.

TR800B cuatro ejes SCARA industrial Robot: El robot es un multi-articulaciones cuatro ejes robot con derechos de propiedad independientes completos de LBD. utiliza un controlador de alto rendimiento para controlar el robot y lograr un movimiento puntual de alta velocidad, movimiento de interpolación lineal espacial, interpolación de arco espacial y otras funciones.es apto para manipulación, carga y descarga., soldadura por puntos, encolado y otras ocasiones industriales.

El SCARA multi-articulaciones manipulador pertenece a la empresa robots de alta precisión, alta velocidad y alto rendimiento. Este El producto está destinado principalmente a la aplicación de tornillos de bloqueo de robot en el 3C industria. Este El producto se desarrolla en base al desarrollado previamente SCARA cuerpo de robot con 600 longitud del brazo.un especial no estándar robot de bloqueo de tornillos con función de posicionamiento visual.

Serie Yaskawa Scara Robot SOC: La serie MOTOMAN-SOC es un robot SCARA especialmente construido para operaciones de alta velocidad. Es adecuado para diversos escenarios, como montaje, transporte, embalaje, clasificación e inspección de piezas pequeñas.

suministro de robots delta fiables y de alta velocidad. Es construir con panasonic servos. admite cámara de visión en líneas de producción

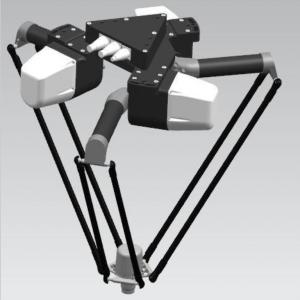
Delta de 4 ejes Robots / Spider los robots son adecuados para la industria del envasado de alimentos.El sistema de visión robótica está disponible también !

Los robots delta de 4 ejes están diseñados para el envasado de alimentos en las líneas de producción. como fábricas de chocolate, galletas y pan.

araña delta industrial Robot: 400 mm-1200 mm diámetro de trabajo 1-3 kg calificado carga útil KEBA enseñar colgante

Robot Araña Industrial Delta: 400 mm-1200 mm de diámetro de trabajo Carga útil nominal de 1-3 kg Colgante de enseñanza KEBA

* Los robots Delta son rentables, de alta calidad y de bajo costo, se pueden personalizar con un diseño OEM para los clientes y admiten información de varios sensores visuales; * El sistema de aplicación de robot TRD se compone principalmente de tres partes: robot, alimentación de alambre y estructura de instalación del robot. El robot consta de un sustrato, una cubierta de motor, un eje giratorio, un brazo de robot principal; está compuesto por brazo mecánico auxiliar y centro de agarre.

El robot delta es una configuración clásica de robot paralelo.tiene las características de tres dimensiones XYZ traslación y rotación alrededor del eje z .tiene las ventajas de velocidad rápida, buena precisión, alta confiabilidad, gran facilidad de uso y bajo costo de mantenimiento.es ampliamente utilizado en campos de clasificación y envasado de alta velocidad.
* Producto ventajas: velocidad rápida, alta precisión * Largo vida útil y rendimiento estable * Fuerte compatibilidad y gran flexibilidad * Simple control y facilidad de uso

*Ventajas del robot: alta velocidad, alta precisión *Larga vida útil y rendimiento estable *Fuerte compatibilidad y gran flexibilidad *Control simple y facilidad de uso



















por favor siga leyendo, manténgase informado, suscríbase y le invitamos a que nos cuente qué piensas.
 IPv6 red compatible 粤ICP备2021036697号
IPv6 red compatible 粤ICP备2021036697号 Servicio en línea
Servicio en línea 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com